Efficient Multi-Agent LLM-based Planning: A Reinforced Approach
Abstract
Grounding the reasoning ability of large language models (LLMs) on embodied agents is challenging due to the complexity of the physical world. Especially, LLM planning for multi-agent collaboration requires communication of agents and credit assignment of total feedback. Thus existing methods relying on physical verification or self-reflection suffer from excessive querying of LLMs.
In this paper, we propose a novel framework for multi-agent collaboration that adopts Reinforced Advantage feedback (ReAd) for the self-refinement of plans. Specifically, we perform critic regression to learn a sequential advantage function from LLM-planned data, and then treat the LLM planner as an optimizer to generate actions that maximize the advantage function, which endows LLM with the foresight to discern whether the action contributes to accomplishing the final task.
We provide theoretical analysis by extending advantage-weighted regression in reinforcement learning to multi-agent systems. We adopt three multi-robot collaboration tasks with difficult variants in experiments. The results show that ReAd surpasses baselines in success rate, and also significantly decreases the interaction steps of agents and query rounds of LLMs.
Method
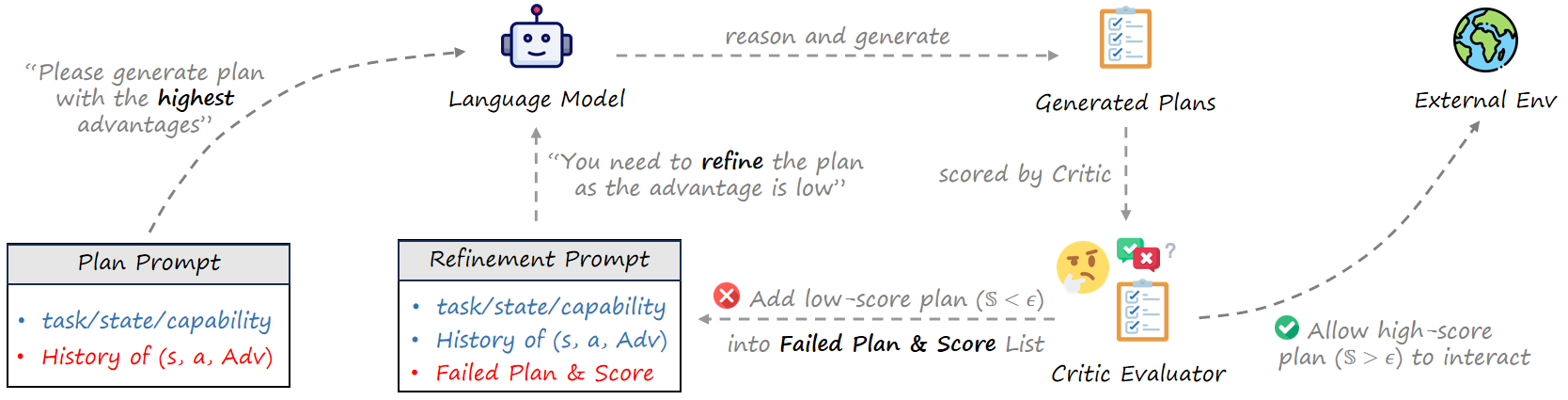
An overview of prompting and refinement. For each timestep \(t\), the LLM planner is given the history which contains states, actions, and advantages, and prompted to generate a plan with the highest advantage. The pre-trained critic is used to evaluate the score of the generated action \(\mathbb{S}_{ReAd}(a_{t}^{i})\). If \(\mathbb{S}_{ReAd}(a_{t}^{i})<\epsilon\), the failed plan is used as a prompt, and the LLM planer is asked to refine the policy until the \(\mathbb{S}_{ReAd}(a_{t}^{i})>\epsilon\) . The (refined) action is used to interact with the environment, and the LLM planner is processed in the next step. In addition, we propose two different approaches called ReAd-S and ReAd-J. ReAd-S will require LLM to plan for each robot separately in a sequential decision manner, and ReAd-J will require LLM to generate planning results for all robots at once.
Experiments Exhibition
We present Difficult Variants of RoCoBench (DV-RoCoBench) for embodied multi-robot collaboration, which is derived from RoCoBench. Below we will show how ReAd-S, ReAd-J and RoCo work on the three most difficult tasks.
- Sweep Floor: There are some cubes on the table, and the two robots need to work together to sweep these cubes and dump them into the trash bin. Task Y3_G3 indicates that the current task only needs to sweep three yellow and three green cubes.
- Make Sandwich: There are some foods on the table, and the two robots must stack these foods in the exact order of the given recipe. Task recipe4 means the recipe length of the current task is 9, task recipe3 means the recipe length of the current task is 7.
- Sort Cubes: There are three cubes on the table, and the three robots need to work together to place these cubes in their corresponding target positions. Task sort5 indicates that there are two cubes in the current task whose distance from the target position is 3, and one cubes whose distance is 1.
ReAd-J
Task: Y3_G3
[LLM dialog] [LLM dialog and prompts]
Task: Recipe4
[LLM dialog] [LLM dialog and prompts]
Task: Sort5
[LLM dialog] [LLM dialog and prompts]
ReAd-S
Task: Y3_G3
[LLM dialog] [LLM dialog and prompts]
Task: Recipe4
[LLM dialog] [LLM dialog and prompts]
Task: Sort5
[LLM dialog] [LLM dialog and prompts]
RoCo
Task: Y3_G3
[LLM dialog] [LLM dialog and prompts]
Task: Recipe4
[LLM dialog] [LLM dialog and prompts]
Task: Sort5
[LLM dialog] [LLM dialog and prompts]
ReAct
Task: Y3_G3
[LLM dialog] [LLM dialog and prompts]
Task: Recipe4
[LLM dialog] [LLM dialog and prompts]
Task: Sort5
[LLM dialog] [LLM dialog and prompts]
MindAgent
Task: Y3_G3
[LLM dialog] [LLM dialog and prompts]
Task: Recipe4
[LLM dialog] [LLM dialog and prompts]
Task: Sort5
[LLM dialog] [LLM dialog and prompts]
Forced Coordination
Forced Coordination is a difficult task of Overcooked-AI. We will show the complete interaction between ReAd-J, MindAgent and Central Plan on this task.

MindAgent
Central Plan
Experiments Using LLama-3.1-70B-Instruct
In addition, we use LLama-3.1-70B-Instruct to compare the performance of ReAd-J、ReAct、MindAgent 、Reflexion and Central Planner. Specifically, we set the temperature of the model to 0 and the top_p to 0.1, take the default values for the other parameters of the model.
ReAd-J
Task: Y2_G3
[LLM dialog] [LLM dialog and prompts]
Robustness Experiments
In addition, we also designed robustness experiments to compare the robustness of ReAd-S and RoCo. Specifically, we reset the state of the environment after a certain environment interaction, but do not clear the historical conversation information, in this setting we compare the performance of ReAd-S and RoCo when they complete the task. The setting of the example shown below is as follows: In task recipe3, reset the environment state after fixing the second environment interaction.
ReAd-S
Task: recipe3
[LLM dialog] [LLM dialog and prompts]
RoCo
Task: recipe3